|
Shiyong Liu I'm a research scientist at DJI in ShenZhen, China, where I work on a small team that mostly works on 4D World Model. I have experience in Large Scene Reconstruction (combining UAV and ground-based capture), Camera Pose Estimation, Motion Capture, VR, Multi-modal Recommendation & Search, Defect Detection, and Machine Vision. I earned my Master's degree from National University of Defense Technology (NUDT). |

|
ResearchI'm interested in 3D computer vision, including camera pose estimation, motion capture and 3D reconstruction. Some papers are highlighted. |
|
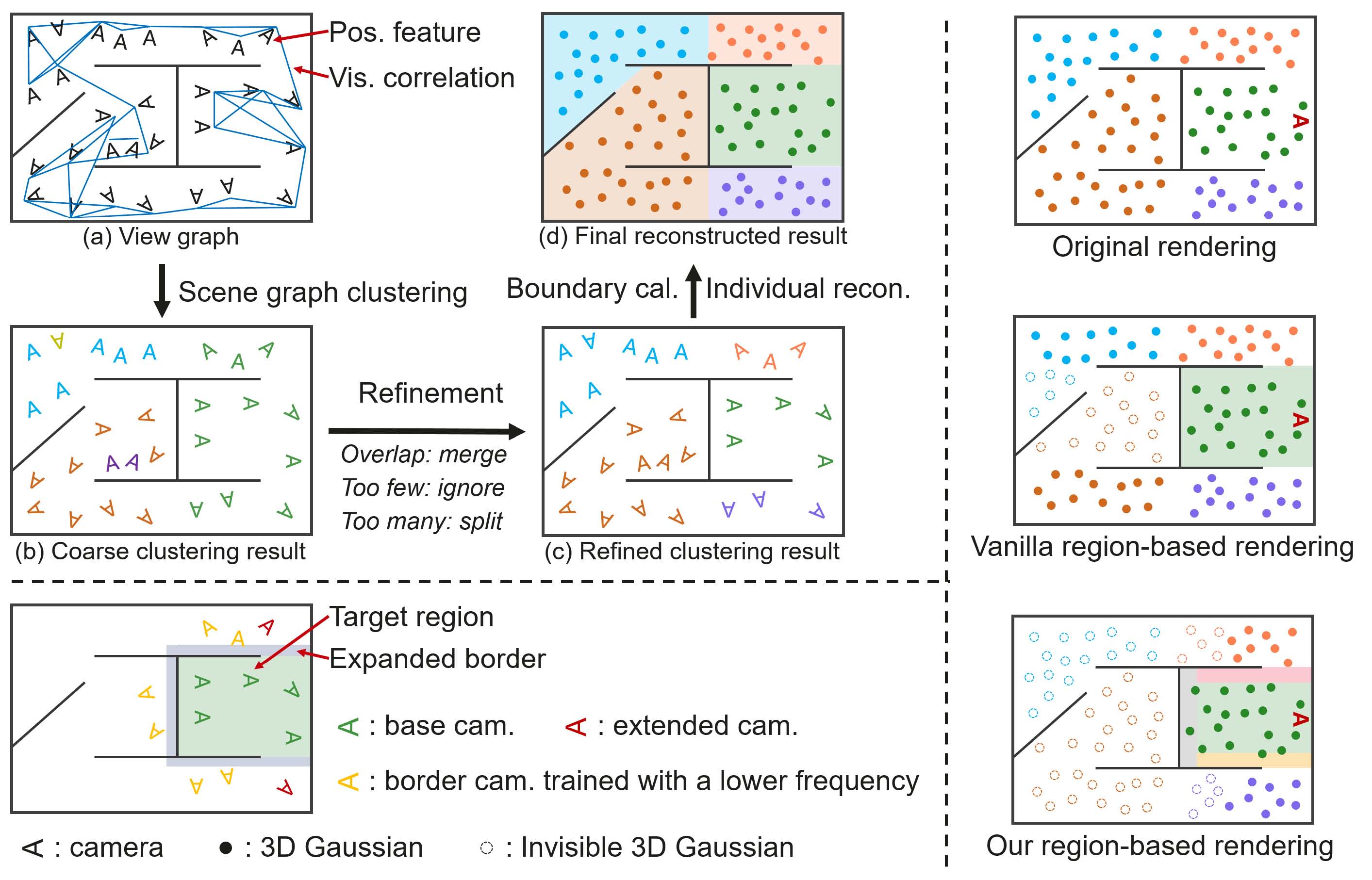
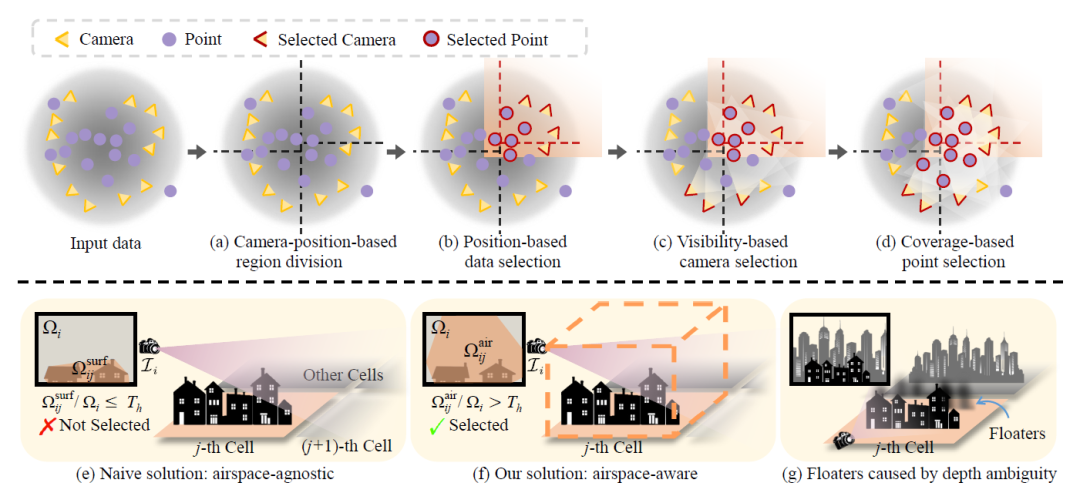
OccluGaussian: Occlusion-Aware Gaussian Splatting for Large Scene Reconstruction and Rendering
Shiyong Liu, Xiao Tang, Zhihao Li, Yingfan He ChongJie Ye, Jianzhuang Liu, Binxiao Huang Shunbo Zhou Xiaofei Wu ICCV, 2025 project page / arXiv A method for accelerating and enhancing large-scale 3D scene reconstruction via occlusion-aware camera clustering and region-based Gaussian culling. |
|
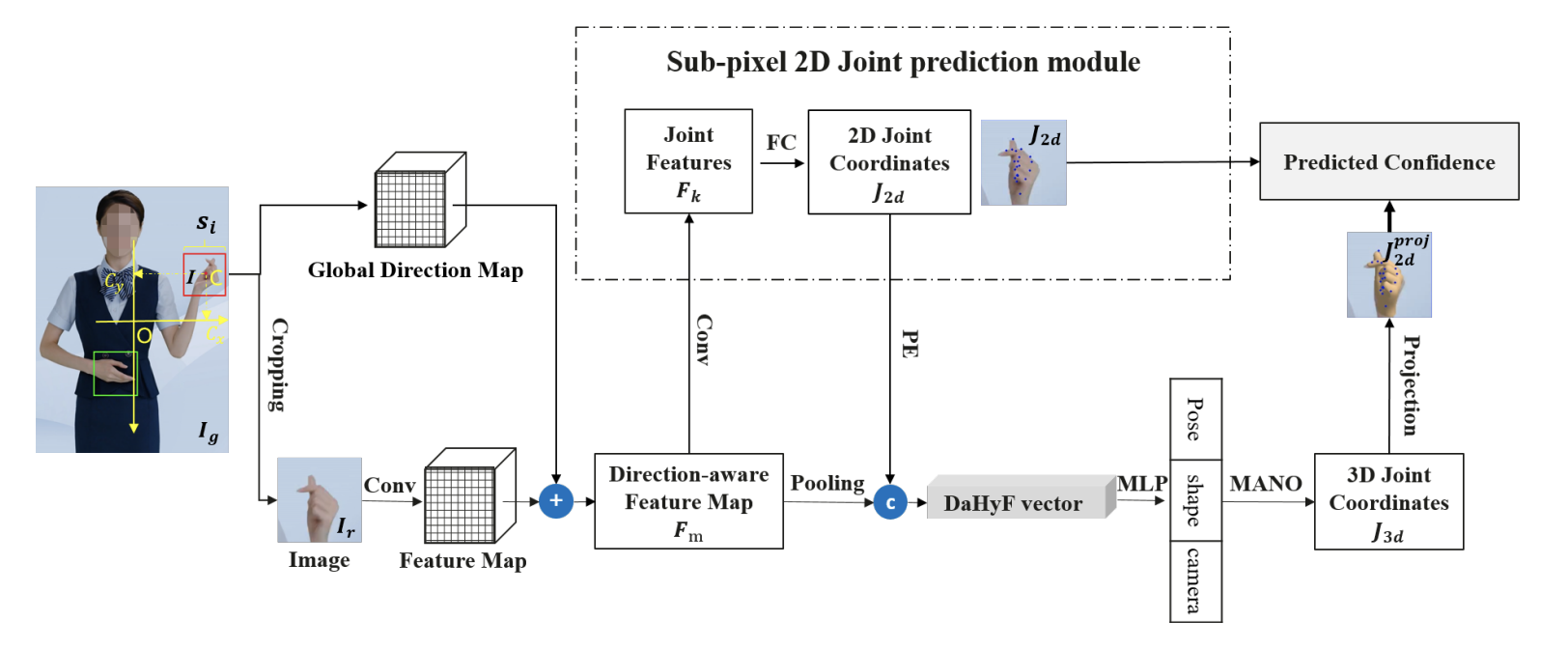
Direction-Aware Hybrid Representation Learning for 3D Hand Pose and Shape Estimation
Shiyong Liu, Zhihao Li, Xiao Tang, Jianzhuang Liu, CVPRW, 2025, First Place in HO3Dv2/v3 leaderboards for the metric of PA-MPJPE project page / arXiv A method for 3D hand pose/shape estimation, fusing implicit image/explicit 2D joint features with pixel direction info, reducing motion jitter via confidence-based prediction. |

|
SpecTRe-GS: Modeling Highly Specular Surfaces with Reflected Nearby Objects by Tracing Rays in 3D Gaussian Splatting
Jiajun Tang, Fan Fei, Zhihao Li, Xiao Tang, Shiyong Liu, Youyu Chen, Binxiao Huang, Dave Zhenyu Chen, Xiaofei Wu, Boxin Shi CVPR, 2025, Highlight project page / arXiv A method for enhancing 3DGS with ray tracing for specular inter-reflections, separating specular/rough surface types and optimizing geometry to improve rendering accuracy and enable scene editing. |
|
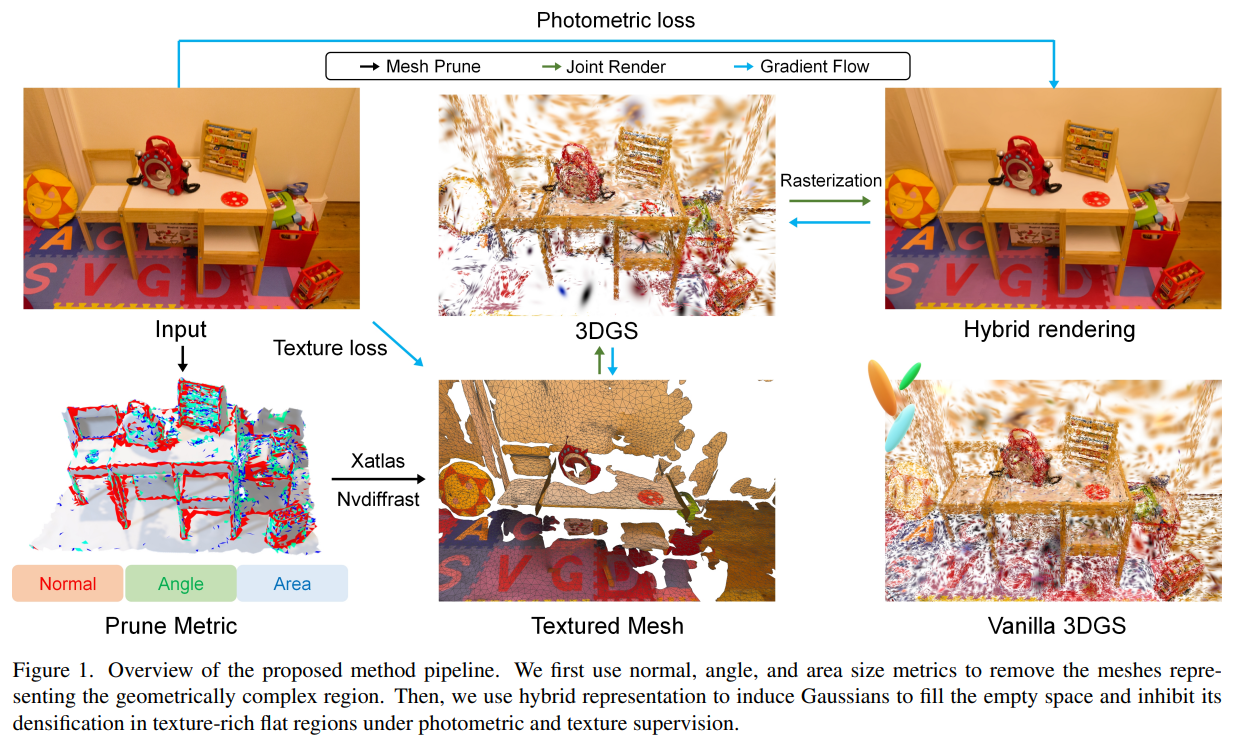
Hybrid Mesh-Gaussian Representation for Efficient Indoor Scene Reconstruction
Binxiao Huang, Zhihao Li, Shiyong Liu, Xiao Tang, Jiajun Tang, Jiaqi Lin, Yuxin Cheng, Zhenyu Chen, Xiaofei Wu, Ngai Wong IJCAI, 2025 project page / arXiv A hybrid 3DGS and textured mesh representation, where meshes handle texture-rich flat regions and Gaussians model complex geometries, optimized via joint training with a warm-up strategy and transmittance-aware supervision, achieving comparable rendering quality at higher FPS with fewer Gaussians. |
|
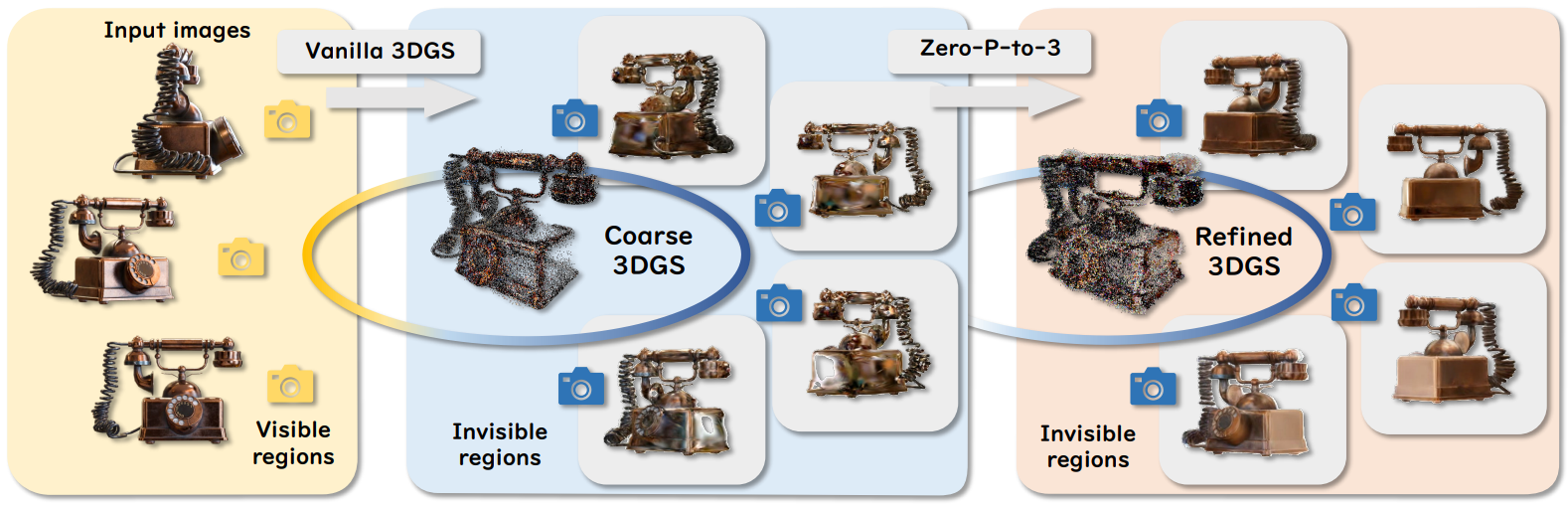
Zero-P-to-3: Zero-Shot Partial-View Images to 3D Object
Yuxuan Lin, Zhihao Li, Ruihang Chu, Zhenyu Chen, Xiao Tang, Lei Ke, Haoling Li, Yingji Zhong, Zhihao Li, Shiyong Liu, Xiaofei Wu, Jianzhuang Liu, Yujiu Yang arXiv, 2025 project page / arXiv Generative 3D reconstruction in partial observation, hindered by limited view range and inconsistent generation, is advanced by the training-free Zero-P-to-3, which integrates local dense observations and multi-source priors via fusion-based DDIM sampling and iterative refinement, outperforming SOTAs especially in invisible regions. |
|
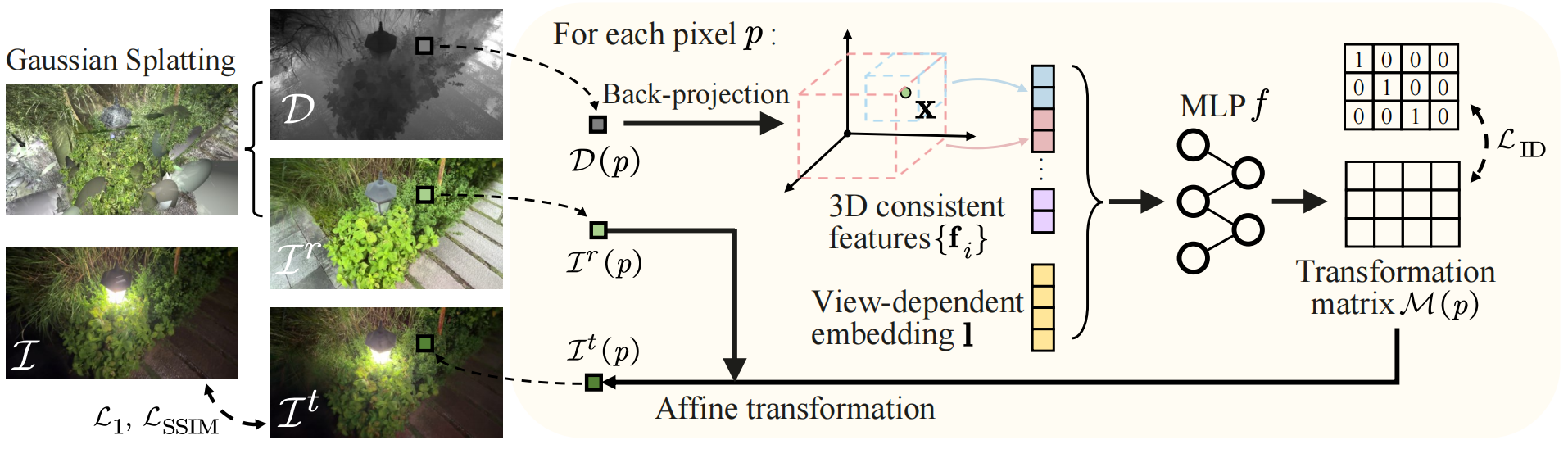
Decoupling Appearance Variations with 3D Consistent Features in Gaussian Splatting
Jiaqi Ling, Zhihao Li, Bingxiao Huang, Xiao Tang Jianzhuang Liu, Shiyong Liu, Xiaofei Wu Fenglong Song Wenming Yang AAAI, 2025 project page / arXiv A method for decoupling appearance variations in a plug-and-play and efficient manner. |
|
Vastgaussian: Vast 3d gaussians for large scene reconstruction
Jiaqi Ling, Zhihao Li, Jianzhuang Liu, Shiyong Liu, Yangdi Lu, Xiaofei Wu Songcen Xu Youliang Yan Wenming Yang CVPR, 2024 project page / arXiv An approach for large scene reconstruction that enabling fast optimization and high-fidelity real-time rendering. |
|
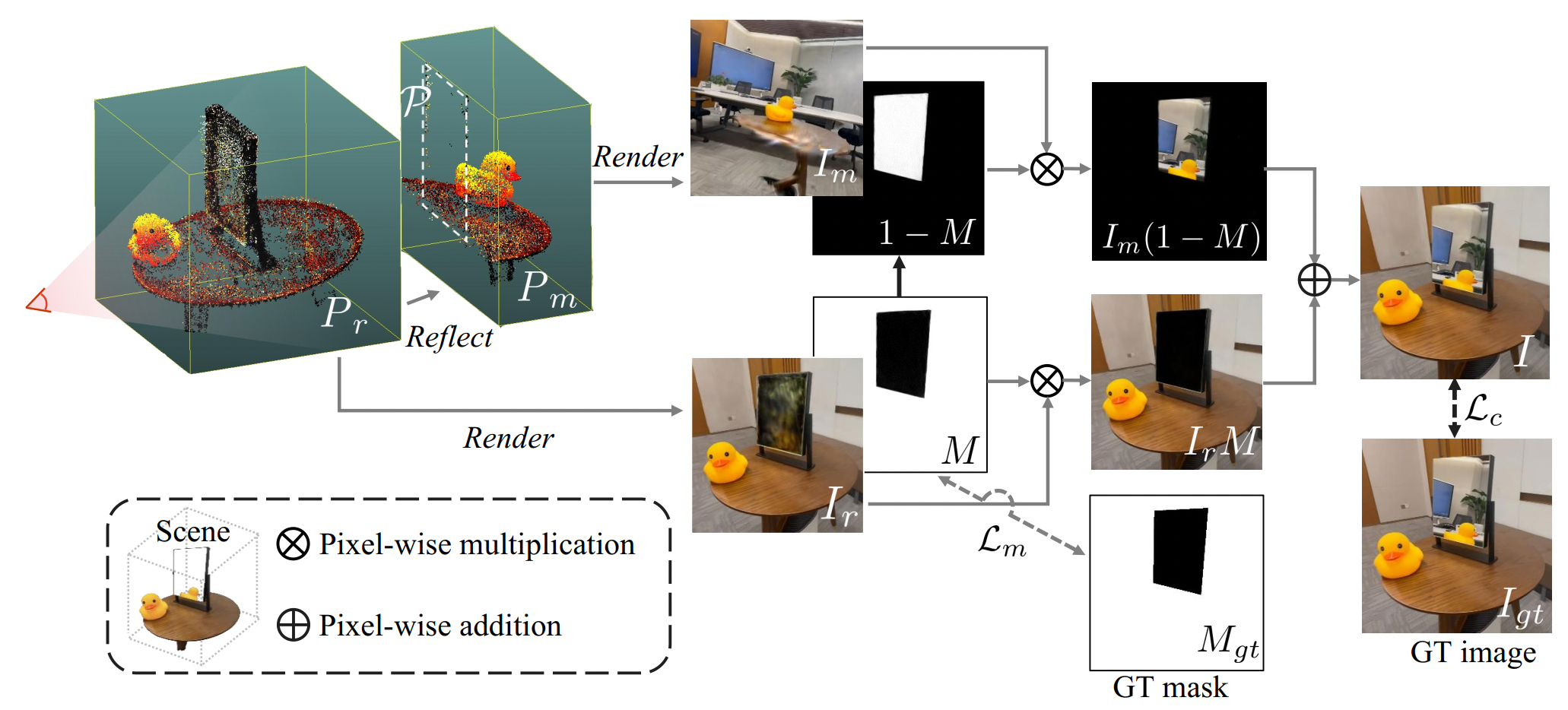
Mirrorgaussian: Reflecting 3d gaussians for reconstructing mirror reflections
Jiayue Liu, Xiao Tang, Freeman Cheng, Roy Yang, Zhihao Li, Jianzhuang Liu, Yi Huang, Jiaqi Lin, Shiyong Liu, Xiaofei Wu Songcen Xu Chun Yuan ECCV, 2024 project page / arXiv MirrorGaussian achieves high-quality and real-time rendering in scenes with mirrors, empowering scene editing like adding new mirrors and objects. |
|
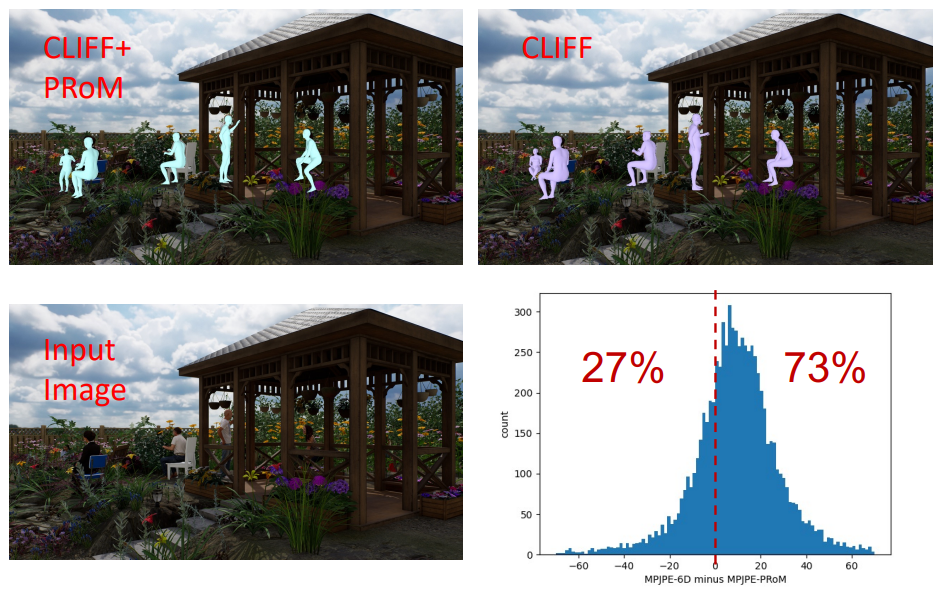
LEARNING UNORTHOGONALIZED MATRICES FOR ROTATION ESTIMATION
Kerui Gu, Zhihao Li, Shiyong Liu, Jianzhuang Liu, Songcen Xu, Youliang Yan, Michael Bi Mi, Kenji Kawaguchi, Angela Yao arXiv, 2023 project page / arXiv Estimating 3D rotations relies on rotation representations, and this work reveals that common orthogonalization procedures slow training efficiency, thus advocating learning unorthogonalized Pseudo Rotation Matrices (PRoM) which converge faster to better solutions and achieve state-of-the-art results in human pose estimation on large-scale benchmarks. |
Miscellanea |
|
Thanks for Jon Barron's website open source source code. |